NXT Projekt: Choď ku stene a vráť sa
From RoboWiki
Zadanie
Toto je jednoduchý rozcvičkový projekt, kde prídete na to, ako čítať hodnotu z otáčkového senzora. Dá sa vyriešiť aj pomocou časovača (timer).
- zostrojte robota, ktorý dokáže ísť vpred
- pripevnite jeden ultrazvukový senzor, ktorý smeruje vpred
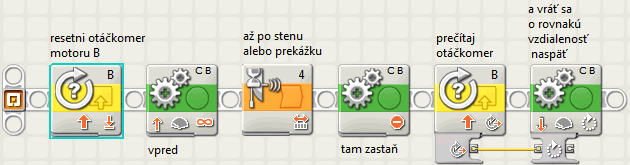
- napíšte program, pomocou ktorého sa robot presunie ku stene a potom zacúva naspäť, pričom zastane na rovnakom mieste
- program musí fungovať nezávisle od toho, ako ďaleko robota od steny umiestnite
Riešenie
- Pre učiteľov:
{kind=link}