Difference between revisions of "Implementácia ramena do Robotického laboratória"
From RoboWiki
m (→Implementácia) |
m (→Implementácia) |
||
| Line 19: | Line 19: | ||
== Implementácia == | == Implementácia == | ||
* Pre implementáciu ramena bolo potrebné upraviť Nasledovné moduly: | * Pre implementáciu ramena bolo potrebné upraviť Nasledovné moduly: | ||
| − | # Modul Robot.h, doplnené boli premenné hovoriace o výske a roztvorenosti ramena, o stave ramena, v ktorom sa prave nachadza int(){dasas;} | + | # Modul Robot.h, doplnené boli premenné hovoriace o výske a roztvorenosti ramena, o stave ramena, v ktorom sa prave nachadza |
| + | int(){dasas;} | ||
# Takisto enumerovany typ pre popis aktualneho stavu ramena. | # Takisto enumerovany typ pre popis aktualneho stavu ramena. | ||
Revision as of 17:45, 22 June 2009
Cieľ
Našim cieľom bolo implementovať rameno pre Robotické Laboratórium, tak aby bola Robotnačka schopná uchopiť, preniesť a položiť rôzne objekty.

Tím
Michal Vince
Špecifikácia
- Cieľom je implementovať funkcionalitu ramien do Robotického laboratória,konkrétne pohyb ramena smerom hore a dole, a roztváranie a zatváranie ramena. Rameno bude mať 2 druhy pohybov:
- hore a dole
- otvoriť a zatvoriť
každý z týchto pohybov sa bude môcť vykonávať o 1 jednotku, resp. na maximálnu úroveň otvorenia, resp. spustenia.
- Zabezpečiť prenos informacií o stave ramena pre zobrazovacie moduly, konkrétne doplniť správy pre moduly o informácie o stave ramena.
- Zobrazovať rameno podľa aktuálneho stavu, upraviť a doplniť zobrazovacie moduly aby boli schopné príjmať upravené správy, získať z nich potrebné informácie pre zobrazenie ramena a nakoniec ho vykresliť.
Implementácia
- Pre implementáciu ramena bolo potrebné upraviť Nasledovné moduly:
- Modul Robot.h, doplnené boli premenné hovoriace o výske a roztvorenosti ramena, o stave ramena, v ktorom sa prave nachadza
int(){dasas;}
- Takisto enumerovany typ pre popis aktualneho stavu ramena.
- robot.cpp pridana funkcia obsluhujaca rameno na zaklade prijateho packetu - packet s pismenom w,a,s,d, znamena....
- pri kazdej zmene stavu ramena je volana funkcia na odoslanie spravy pre zobrazujuce moduly
- V module Robot.cpp bola doplnena funkcia odosielajuca paket s informaciami o aktualnom stave Robotnacky (napr pre zobrazovaci modul) a
- Do zobrazovacieho modulu boli doplnene funkcie pre vykreslovanie
Demo
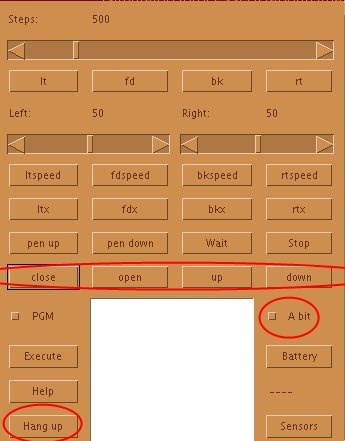
- Ovladaci panel,tlacitko Connect sluzi na nadviazanie spojenia s Robotnackou. Vyznacene tlacitka sluzia na obsluhu ramena. Pri zapnutom prepinaci A bit sa rameno pohybuje o 1 jednotku.
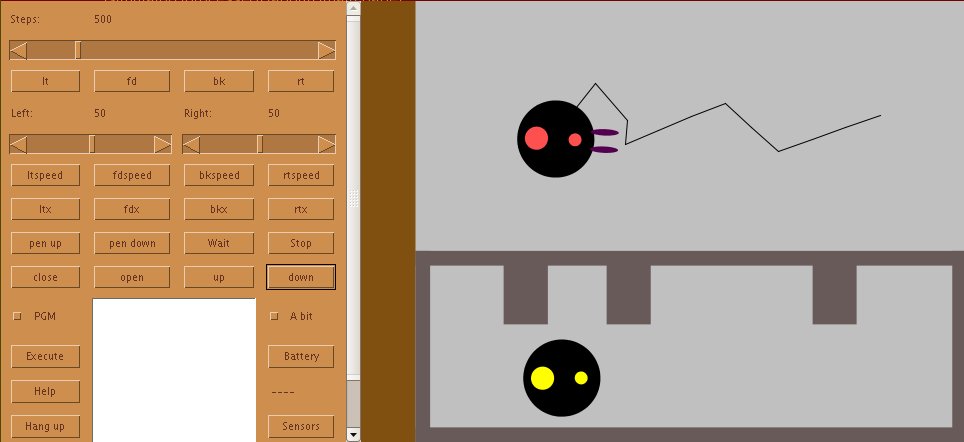
- Robotnacka s otvorenym ramenom sputenym uplne dole.
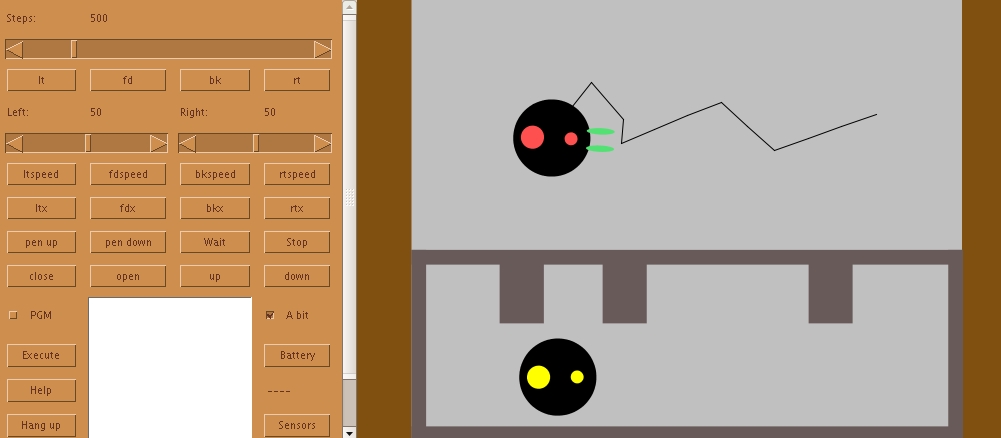
- Robotnacka s otvorenym ramenom vytiahnutym uplne hore
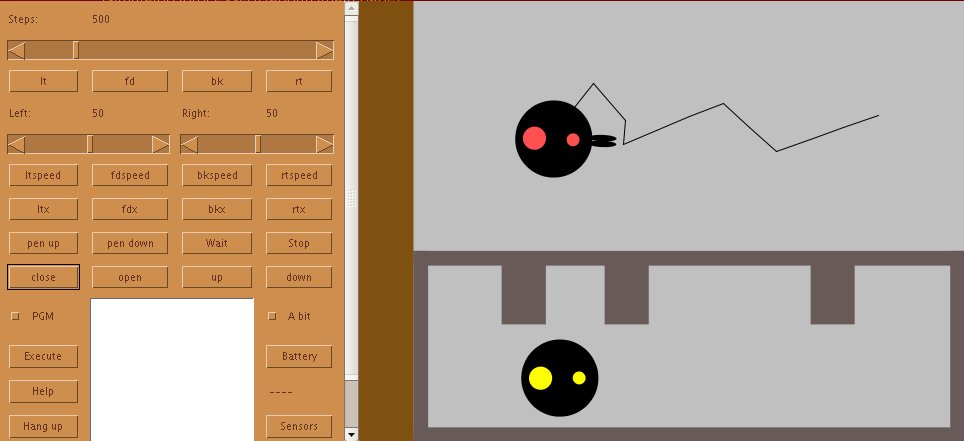
- Robotnacka so zatvorenym ramenom spustenym uplne dole