Difference between revisions of "Trajectory from gyro/accellerometer/compas"
From RoboWiki
(→O súčiastke:) |
(→O súčiastke:) |
||
| Line 10: | Line 10: | ||
** magnetometer | ** magnetometer | ||
** gyroskop | ** gyroskop | ||
| + | |||
| + | https://dlnmh9ip6v2uc.cloudfront.net//images/products/9/6/2/3/09623-01b.jpg | ||
| + | [[File:https://dlnmh9ip6v2uc.cloudfront.net//images/products/9/6/2/3/09623-01b.jpg|right|100px|caption]] | ||
Revision as of 10:46, 25 June 2013
Zadanie:
Trajectory from gyro/accellerometer/compas. Requirement: must use this part: 9DOF IMU, use any real robot.
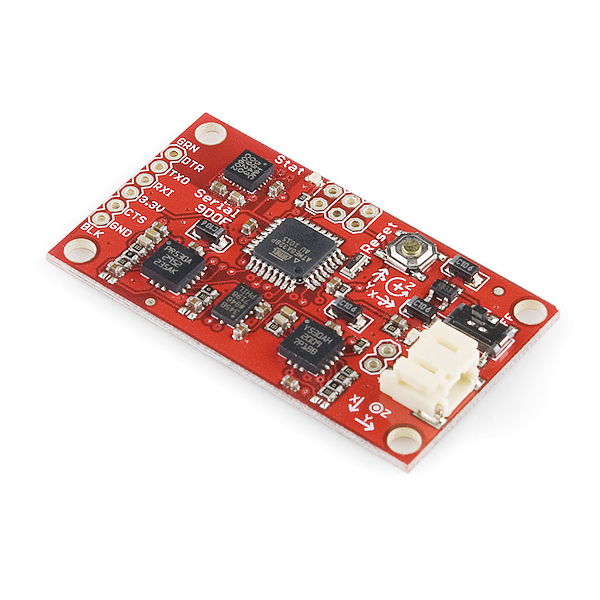
O súčiastke:
V projekte sme museli využiť súčiastku 9DOF IMU
- Na doske 9DOF IMU sa nachádzajú nasledujúce komponenty:
- akcelerometer
- magnetometer
- gyroskop
https://dlnmh9ip6v2uc.cloudfront.net//images/products/9/6/2/3/09623-01b.jpg
{kind=link}
{kind=link}