Implementácia ramena do Robotického laboratória
From RoboWiki
Cieľ
Našim cieľom bolo implementovať rameno pre Robotické Laboratórium, tak aby bola Robotnačka schopná uchopiť, preniesť a položiť rôzne objekty.

Tím
Michal Vince
Špecifikácia
- Cieľom je implementovať funkcionalitu ramien do Robotického laboratória,konkrétne pohyb ramena smerom hore a dole, a roztváranie a zatváranie ramena. Rameno bude mať 2 druhy pohybov:
- hore a dole
- otvoriť a zatvoriť
každý z týchto pohybov sa bude môcť vykonávať o 1 jednotku, resp. na maximálnu úroveň otvorenia, resp. spustenia.
- Zabezpečiť prenos informacií o stave ramena pre zobrazovacie moduly, konkrétne doplniť správy pre moduly o informácie o stave ramena.
- Zobrazovať rameno podľa aktuálneho stavu, upraviť a doplniť zobrazovacie moduly aby boli schopné príjmať upravené správy, získať z nich potrebné informácie pre zobrazenie ramena a nakoniec ho vykresliť.
Implementácia
- Pre implementáciu ramena bolo potrebné upraviť Nasledovné moduly:
- Modul Robot.h, kde boli doplnené premenné hovoriace o výške a roztvorenosti ramena, o stave ramena, v ktorom sa práve nachádza, a enumerovany typ so všetkými možnými stavmi ramena.
- Robot.cpp, kde bola pridaná funkcia, obsluhujúca rameno. Na základe prijatého paketu rozhodne o ďalšom stave ramena, prípadne o počte jednotiek o koľko bude rameno roztvorené/pritvorené, alebo zodvihnuté/položené. Funkcia pri každej zmene stavu volá metódu na odoslanie správy pre zobratujúce moduly. Táto bol tiež doplnená o informacie o stave ramena
- Viewer.java, je zobrazovací modul, ktorý príjma správy o pohybe Robotnačky. Bol upravený aby príjmal spravy, v ktorých sa už nachádza informácia o výške a roztvorení ramena. Samotné rameno je zobrazené pomocou dvoch elíps, roztvorenie ramena určuje ich vzájomnú vzdialenosť. Červená zložka RGB farby ramena je určena výškou ramena, zelena jeho roztvorením a modrá oboma premennými.
Demo
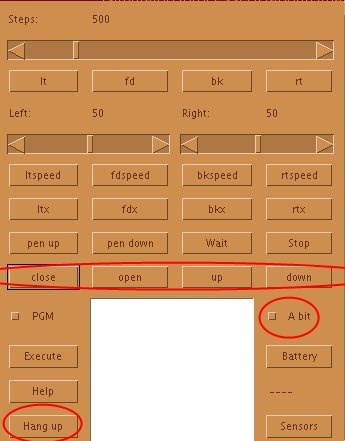
- Ovladaci panel,tlacitko Connect sluzi na nadviazanie spojenia s Robotnackou. Vyznacene tlacitka sluzia na obsluhu ramena. Pri zapnutom prepinaci A bit sa rameno pohybuje o 1 jednotku.
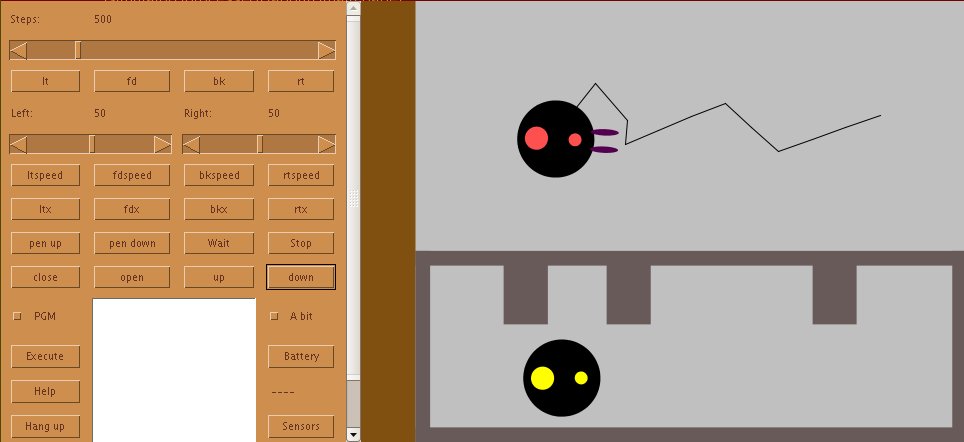
- Robotnacka s otvorenym ramenom sputenym uplne dole.
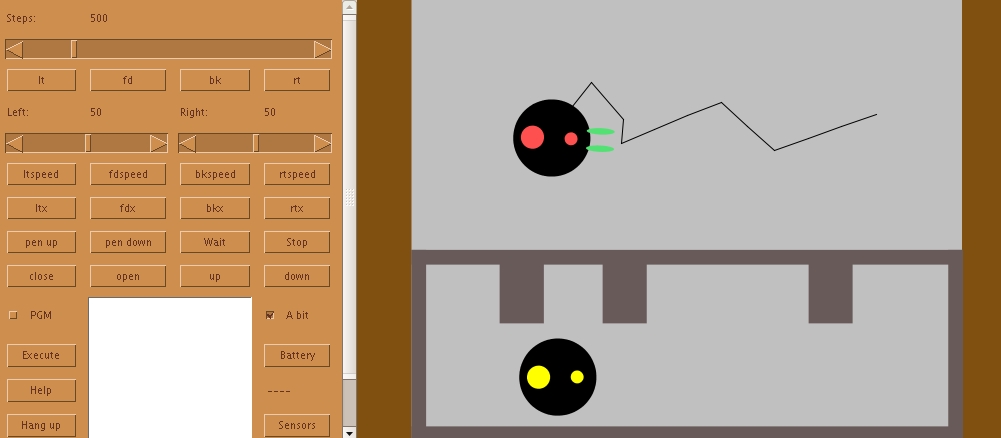
- Robotnacka s otvorenym ramenom vytiahnutym uplne hore
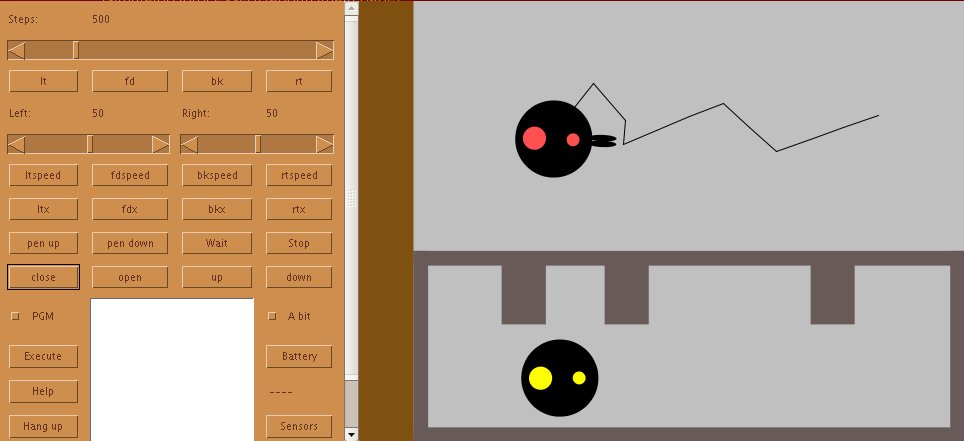
- Robotnacka so zatvorenym ramenom spustenym uplne dole