naspäť na hlavnú stránku
Zadanie
Toto je projekt, kde si osvojíte komunikáciu dvoch kociek cez BlueTooth. Mali by na ňom spolupracovať dve skupiny.
- poskladajte dva podobné roboty, ktoré sa dokážu pohybovať vpred a zatáčať
- roboty majú namontované ultrazvukové senzory smerom vpred
- roboty štartujú oproti sebe a začnú sa pohybovať vpred
- keď sa priblížia na malú vzdialenosť (asi 15-20 cm), zastanú
- jeden z nich si hodí kockou (vygeneruje náhodné číslo 1 alebo 2), ktoré určí, či sa roboty obídu navzájom zľava, alebo sprava
- toto číslo pošle cez BlueTooth druhému robotovi
- obidva roboty sa tesnou výhybkou vyhnú zľava (číslo 1) alebo sprava (číslo 2) a pokračujú po priamke svojho pôvodného pohybu, pozri obrázok
Potrebujete poradiť?
- kocky treba najskôr spojiť cez BlueTooth, najlepšie ručne - vyhľadajte menu BlueTooth a uistite sa, že obe kocky majú BlueTooth zapnutý (ON) - zistíte to tak, že keď je BlueTooth zapnutý, v ľavom hornom rohu svieti malá ikonka v tvare BlueTooth
- dajte pozor, aby kocky v triede mali rozličné mená (meno kocky sa dá zmeniť v programe NXT-G v okne "NXT Window"
- keď je BlueTooth zapnutý, jedna kocka musí vyhľadať druhú (pomocou voľby Search v menu BlueTooth), potom obe kocky potvrdia rovnaký štvormiestny PIN-kód a kocka, ktorá dala druhú vyhľadávať si vyberie na ktoré zo spojení 1,2,3 si druhú kocku umiestni. Na druhej kocke (ktorá bola vyhľadaná) to bude vždy spojenie číslo 0.
- na komunikáciu použite bloky na poslanie a prijatie správy (obrázok vpravo)
- dajte pozor, aby ste zvolili správne číslo spojenia a rovnaké číslo schránky na oboch stranách
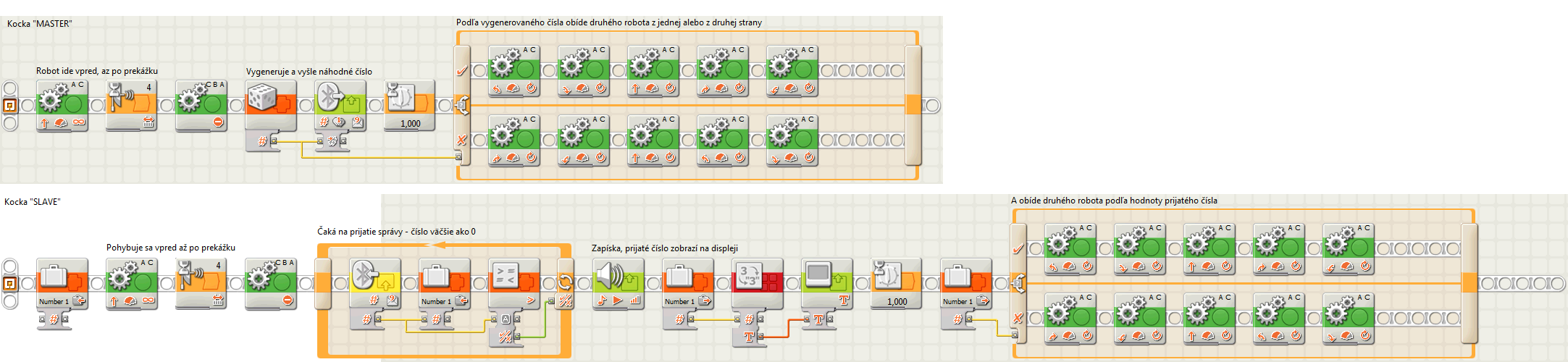
- blok prijatia správy vráti 0, ak žiadna správa nebola prijatá - preto treba správu prijímať do premennej a zároveň cykliť až kým porovnanie (použite blok porovnania) nepovie, že bola prijatá správa > 0.
Video
Riešenie
|

Poslanie správy
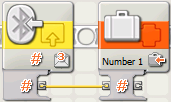
Prijatie správy
|



{kind=link}