Difference between revisions of "Balancujuci robot"
From RoboWiki
m |
|||
| (One intermediate revision by the same user not shown) | |||
| Line 3: | Line 3: | ||
Robot sa vie pohybovať vpred a vzad, pričom kocka NXT je umiestnená | Robot sa vie pohybovať vpred a vzad, pričom kocka NXT je umiestnená | ||
nad vozidlom v nestabilnej polohe a je spojená s robotom pomocou tretieho | nad vozidlom v nestabilnej polohe a je spojená s robotom pomocou tretieho | ||
| − | + | motora. | |
Robot je na diaľku cez BlueTooth ovládaný pomocou druhej kocky NXT - tlačidlá | Robot je na diaľku cez BlueTooth ovládaný pomocou druhej kocky NXT - tlačidlá | ||
| Line 11: | Line 11: | ||
HiTechnic. | HiTechnic. | ||
| − | [[Image:balance1.jpg]] | + | {| |
| − | [[ | + | | [[Image:balance1s.jpg]] || [[Image:balance2s.jpg]] || [[Image:balance3s.jpg]] |
| − | [[ | + | |- |
| + | | ([[Media:balance1.jpg|+]]) || ([[Media:balance2.jpg|+]]) || ([[Media:balance3.jpg|+]]) | ||
| + | |} | ||
Program pre kocku diaľkové ovládanie: [[Media:dialkove_ovladanie.nxc|dialkove_ovladanie.nxc]]. | Program pre kocku diaľkové ovládanie: [[Media:dialkove_ovladanie.nxc|dialkove_ovladanie.nxc]]. | ||
Program pre balancujúcu kocku: [[Media:balance.nxc|balance.nxc]]. | Program pre balancujúcu kocku: [[Media:balance.nxc|balance.nxc]]. | ||
Latest revision as of 22:50, 14 October 2008
Autori: Mišo, Moro, Ľubo
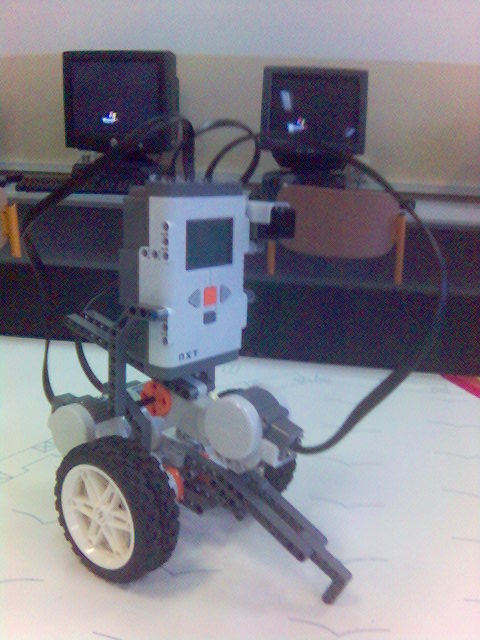
Robot sa vie pohybovať vpred a vzad, pričom kocka NXT je umiestnená nad vozidlom v nestabilnej polohe a je spojená s robotom pomocou tretieho motora.
Robot je na diaľku cez BlueTooth ovládaný pomocou druhej kocky NXT - tlačidlá šípiek VĽAVO a VPRAVO riadia robota vľavo a vpravo a stredné oranžové tlačidlo robota zastavuje a štartuje vpred. Zároveň tretí motor riadi polohu kocky tak, aby zotrvávala v nestabilnej vzpriamenej polohe pomocou akcelarčného senzora HiTechnic.
 |
 |

|
| (+) | (+) | (+) |
{kind=link}
{kind=link}
{kind=link}
Program pre kocku diaľkové ovládanie: dialkove_ovladanie.nxc.
Program pre balancujúcu kocku: balance.nxc.