Difference between revisions of "Gripper Functionality for Remotely-Operated Robotics Laboratory"
From RoboWiki
m (→Specification) |
(→Implementácia) |
||
| Line 17: | Line 17: | ||
* Thirdly, to visualize gripper according to current status, edit and complete viewer modules so that they are able to receive edited data, to gain necessary information from them for gripper´s visualization and lastly depicting it. | * Thirdly, to visualize gripper according to current status, edit and complete viewer modules so that they are able to receive edited data, to gain necessary information from them for gripper´s visualization and lastly depicting it. | ||
| − | == | + | == Implementation == |
| − | * | + | * For implementation of the gripper was necessary to edit following modules: |
| − | # | + | # To Module Robot.h were added variables of height and degree of opening, variables of gripper´s status, which in does it occur and of enumerated type with the all possible states of gripper. |
| − | # Robot.cpp, | + | # Robot.cpp, was added the function of operating the gripper. On the basis of received packet, it decides on further status of the gripper, eventually on amount of units, how the gripper will be opened/closed, or lifted/laid. This function calls a method for sending data for viewers modules with every change of status. This was supplied with information of gripper´s status. |
| − | # Viewer.java, | + | # Viewer.java, is viewers module, which receives data about movements od Robotnačka. It was modified to accept reports, which in the information on height and gape of gripper already occurs. The gripper itself, is depicted by using two elipses, the gape of gripper shapes their mutual distance. The red element of RGB colour of the gripper is specified by the height of gripper, the green one by its gape and the blue by both variables. |
== Demo == | == Demo == | ||
Revision as of 19:58, 22 June 2009
Cieľ
Našim cieľom bolo implementovať rameno pre Robotické Laboratórium, tak aby bola Robotnačka schopná uchopiť, preniesť a položiť rôzne objekty.

Tím
Michal Vince
Specification
- Firstly, the goal is to implement gripper functionality into robotic labolatory, concretely movements of a gripper up and down, release and grasp of the gripper. The gripper will perform two types of movements:
- up and down
- open and close.
Each of these movements can be done one unit further, or said differentely into maximum level of opening, or closing.
- Secondly, to guarantee transmission of information on the status of gripper for viewer modules, to be specific, to complete information on the status of gripper into messages for viewer modules.
- Thirdly, to visualize gripper according to current status, edit and complete viewer modules so that they are able to receive edited data, to gain necessary information from them for gripper´s visualization and lastly depicting it.
Implementation
- For implementation of the gripper was necessary to edit following modules:
- To Module Robot.h were added variables of height and degree of opening, variables of gripper´s status, which in does it occur and of enumerated type with the all possible states of gripper.
- Robot.cpp, was added the function of operating the gripper. On the basis of received packet, it decides on further status of the gripper, eventually on amount of units, how the gripper will be opened/closed, or lifted/laid. This function calls a method for sending data for viewers modules with every change of status. This was supplied with information of gripper´s status.
- Viewer.java, is viewers module, which receives data about movements od Robotnačka. It was modified to accept reports, which in the information on height and gape of gripper already occurs. The gripper itself, is depicted by using two elipses, the gape of gripper shapes their mutual distance. The red element of RGB colour of the gripper is specified by the height of gripper, the green one by its gape and the blue by both variables.
Demo
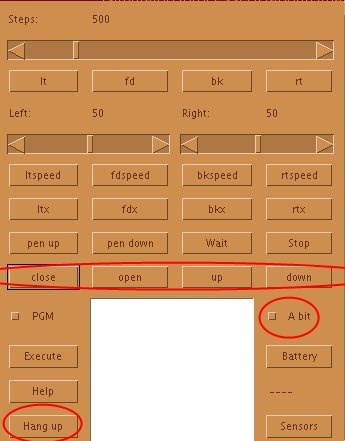
- Ovladaci panel,tlacitko Connect sluzi na nadviazanie spojenia s Robotnackou. Vyznacene tlacitka sluzia na obsluhu ramena. Pri zapnutom prepinaci A bit sa rameno pohybuje o 1 jednotku.
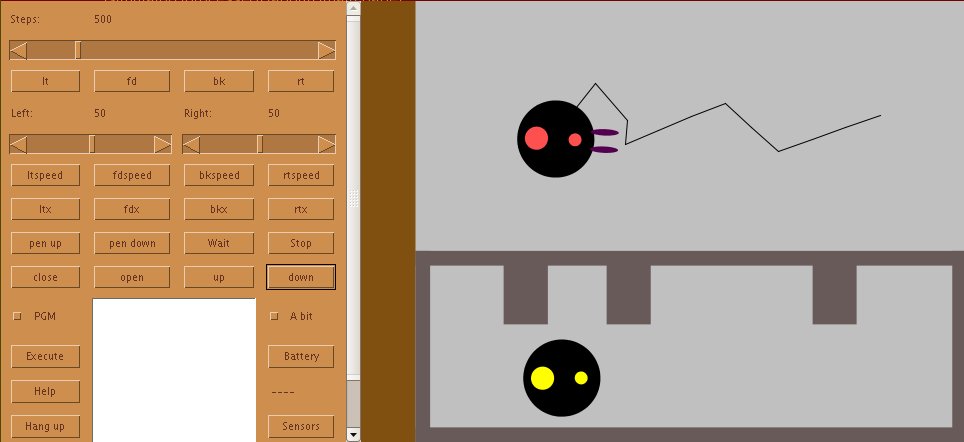
- Robotnacka s otvorenym ramenom sputenym uplne dole.
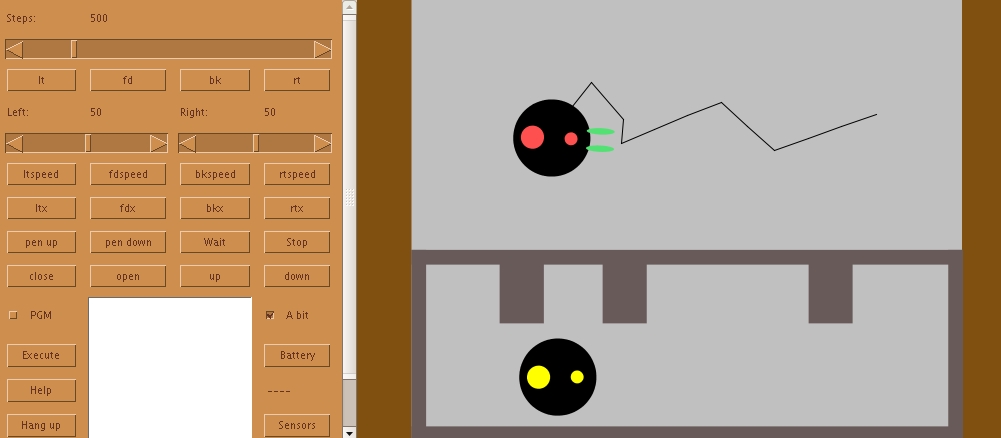
- Robotnacka s otvorenym ramenom vytiahnutym uplne hore
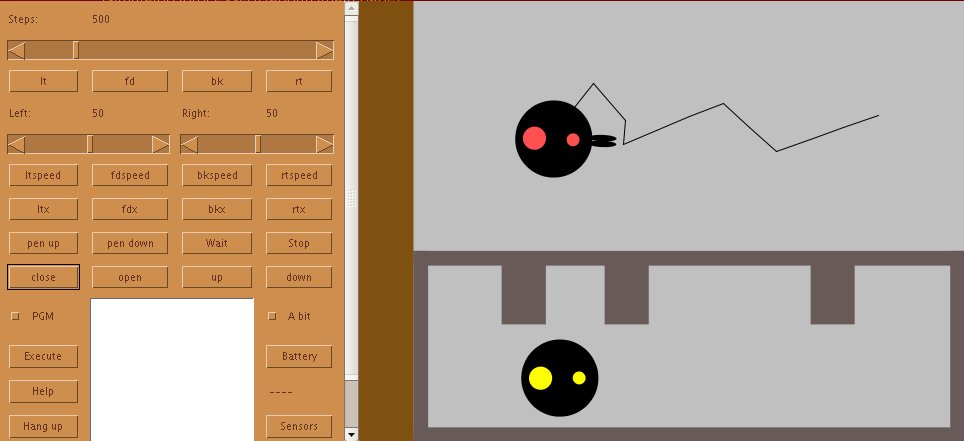
- Robotnacka so zatvorenym ramenom spustenym uplne dole