Gripper Functionality for Remotely-Operated Robotics Laboratory
From RoboWiki
The goal
The goal of my/our project was to implement gripper for Robotické Laboratórium, so that it will be able to gripe, transport and put down different objects.

Team
Michal Vince
Specification
- Firstly, the goal is to implement gripper functionality into robotic labolatory, concretely movements of a gripper up and down, release and grasp of the gripper. The gripper will perform two types of movements:
- up and down
- open and close.
Each of these movements can be done one unit further, or said differentely into maximum level of opening, or closing.
- Secondly, to guarantee transmission of information on the status of gripper for viewer modules, to be specific, to complete information on the status of gripper into messages for viewer modules.
- Thirdly, to visualize gripper according to current status, edit and complete viewer modules so that they are able to receive edited data, to gain necessary information from them for gripper´s visualization and lastly depicting it.
Implementation
For implementation of the gripper was necessary to edit following modules:
- To Module Robot.h were added variables of height and degree of opening, variables of gripper´s status, which in does it occur and of enumerated type with the all possible states of gripper.
int g_actualWidth;
int g_actualHeight;
int g_pointOfGrip;
int g_carryID;
int g_state; // movement type (GRIPPER_MOVE_* from the enum gripper movement)
int g_destination;
enum virtual_robot_gripper_movment {
GRIPPER_MOVE_NONE, // not moving (gripper is idle)
GRIPPER_MOVE_UP, // executing a positional command
GRIPPER_MOVE_DOWN,
GRIPPER_MOVE_OPENING,
GRIPPER_MOVE_CLOSING
};
- Robot.cpp, was added the function of operating the gripper. On the basis of received packet, it decides on further status of the gripper, eventually on amount of units, how the gripper will be opened/closed, or lifted/laid. This function calls a method for sending data for viewers modules with every change of status. This was supplied with information of gripper´s status.
- Viewer.java, is viewers module, which receives data about movements od Robotnačka. It was modified to accept reports, which in the information on height and gape of gripper already occurs. The gripper itself, is depicted by using two elipses, the gape of gripper shapes their mutual distance. The red element of RGB colour of the gripper is specified by the height of gripper, the green one by its gape and the blue by both variables.
Demo
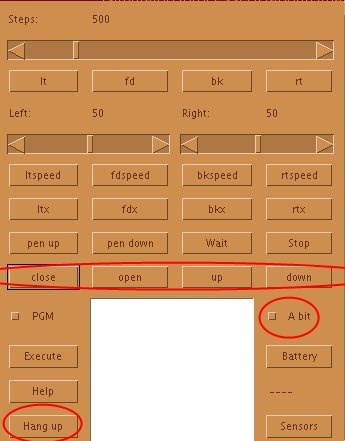
- Control panel devise, the button "Connect" serves for establishment of connection with Robotnačka. Marked buttons serve for gripper´s manipulation. With commutator A bit turned on, the gripper moves one unit further.
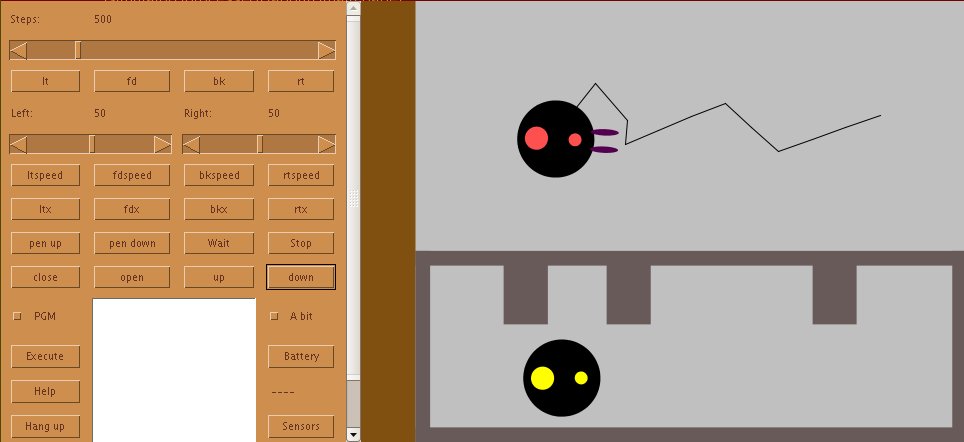
- Robotnacka with opened gripper laid fully down.
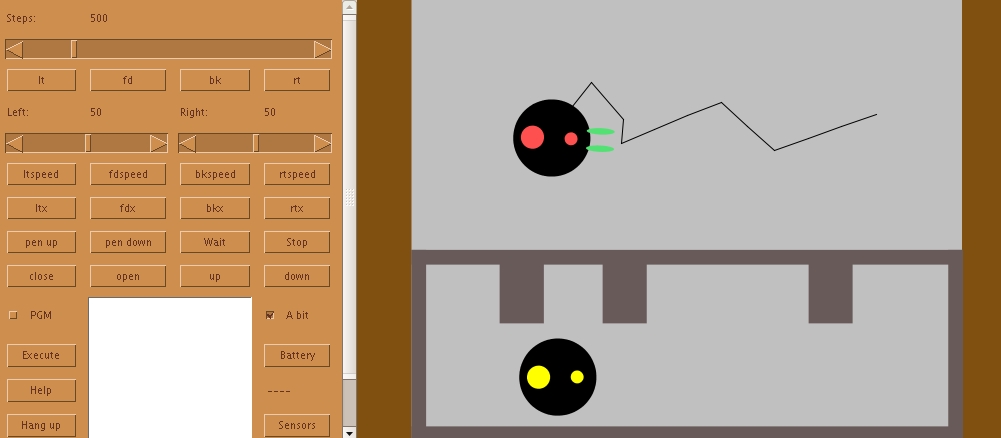
- Robotnacka with opened gripper taken out fully up.
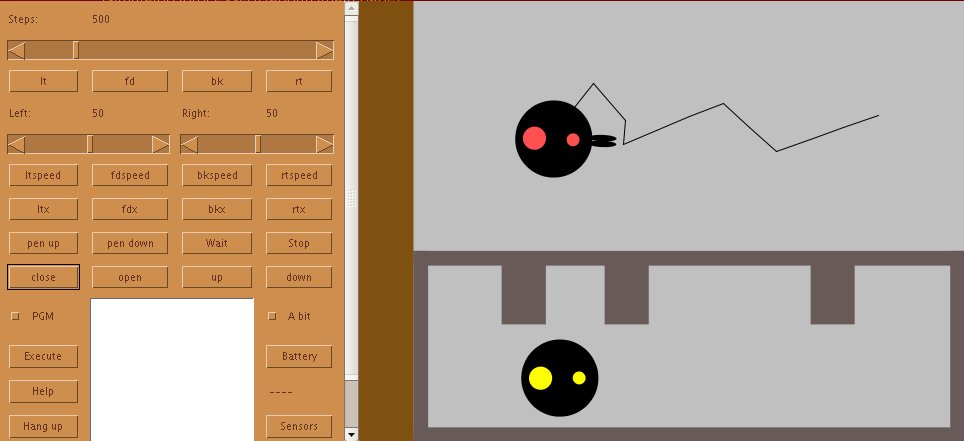
- Robotnacka with closed gripper fully down.