Difference between revisions of "Goooooooo"
(→Project Files) |
|||
| (9 intermediate revisions by one other user not shown) | |||
| Line 6: | Line 6: | ||
'''Author(s): '''Iryna, Serdar, Jose Ignacio <BR> | '''Author(s): '''Iryna, Serdar, Jose Ignacio <BR> | ||
'''Country: '''Ukraine, Turkey, Spain <BR> | '''Country: '''Ukraine, Turkey, Spain <BR> | ||
| − | '''Date: ''' | + | '''Date: '''09.07.2010 <BR> |
'''Activity: ''' [Rusty Ugly Robots]<BR> | '''Activity: ''' [Rusty Ugly Robots]<BR> | ||
'''Location: ''' Bratislava, SVK <BR> | '''Location: ''' Bratislava, SVK <BR> | ||
'''Hardware: ''' LEGO NXT, ultrasonic sensor, sound sensor, light sensor, touch sensors (2) <BR> | '''Hardware: ''' LEGO NXT, ultrasonic sensor, sound sensor, light sensor, touch sensors (2) <BR> | ||
| + | [[Image:gooo2.jpg|200px]] | ||
| + | [[Image:LINE.ALGORYTHM.bmp|200px]] | ||
== Abstract == | == Abstract == | ||
| Line 16: | Line 18: | ||
This model has all kind of sensors and can be easily modified for new options. BUT!!! be carefull! it's crazy! and can turn round only being touched. It moves forward only with the voice signal. Also it stops when it's edge near or some obstacle in front of it))) | This model has all kind of sensors and can be easily modified for new options. BUT!!! be carefull! it's crazy! and can turn round only being touched. It moves forward only with the voice signal. Also it stops when it's edge near or some obstacle in front of it))) | ||
good one! (LEGO rules) | good one! (LEGO rules) | ||
| + | |||
Our robot has also another programme - linefollowing) it's like an artificial intellect! our robot can not follow the line, but it can make it's own decision what to do) | Our robot has also another programme - linefollowing) it's like an artificial intellect! our robot can not follow the line, but it can make it's own decision what to do) | ||
the BEST! | the BEST! | ||
| Line 24: | Line 27: | ||
| '''Description''' || '''Download''' | | '''Description''' || '''Download''' | ||
|- | |- | ||
| − | | Video: || [http://robotika.sk/ | + | | Video: || [http://robotika.sk/holls/2010/video/goooo.avi gooo1.avi] |
|- | |- | ||
| − | | Video: || [http://robotika.sk/ | + | | Video: || [http://robotika.sk/holls/2010/video/gooo2.avi gooo2.avi] |
|- | |- | ||
| Source code in NXT-G || [[Media:gooo.rbt]] | | Source code in NXT-G || [[Media:gooo.rbt]] | ||
| + | |- | ||
| + | | Source code in NXT-G || [http://robotika.sk/holls/2010/video/linefollower.rbt linefollower.rbt] | ||
| + | |- | ||
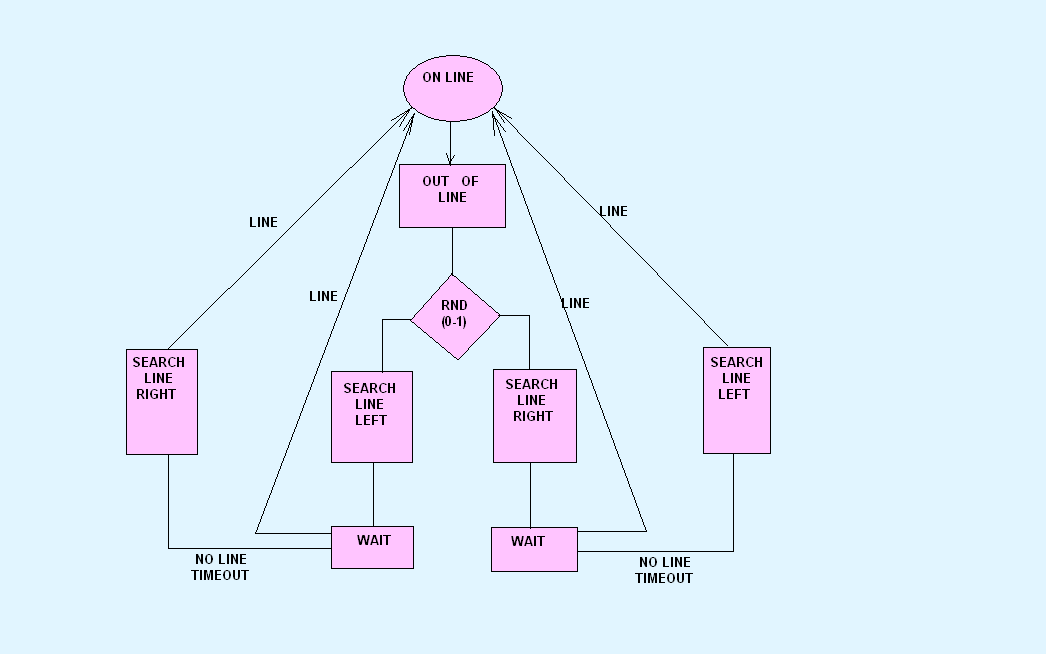
| + | | Line Follower Algorythm || [[Media:LINE.ALGORYTHM.bmp]] | ||
|- | |- | ||
|} | |} | ||
Latest revision as of 10:48, 24 July 2010
Overview

Author(s): Iryna, Serdar, Jose Ignacio
Country: Ukraine, Turkey, Spain
Date: 09.07.2010
Activity: [Rusty Ugly Robots]
Location: Bratislava, SVK
Hardware: LEGO NXT, ultrasonic sensor, sound sensor, light sensor, touch sensors (2)


Abstract
This model has all kind of sensors and can be easily modified for new options. BUT!!! be carefull! it's crazy! and can turn round only being touched. It moves forward only with the voice signal. Also it stops when it's edge near or some obstacle in front of it))) good one! (LEGO rules)
Our robot has also another programme - linefollowing) it's like an artificial intellect! our robot can not follow the line, but it can make it's own decision what to do) the BEST!
Project Files
| Description | Download |
| Video: | gooo1.avi |
| Video: | gooo2.avi |
| Source code in NXT-G | Media:gooo.rbt |
| Source code in NXT-G | linefollower.rbt |
| Line Follower Algorythm | Media:LINE.ALGORYTHM.bmp |
{kind=link}
Go back to the List of the projects