Difference between revisions of "Dron sledovanie čiary -Patrik Homola"
From RoboWiki
(→Program) |
|||
| (6 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
Cieľom tohto projektu bolo naučiť drona Tello sledovať čiaru pomocou kamery. | Cieľom tohto projektu bolo naučiť drona Tello sledovať čiaru pomocou kamery. | ||
| + | [[File:TelloDroneFollowingLine.jpg|200px|thumb|left|alt text]] | ||
| − | == | + | == Hardver == |
| + | Dron tello. | ||
| + | Bolo potrebné vytlačiť nástavec so zrkadlom, aby dron mohol snímať zem. | ||
| + | https://www.thingiverse.com/thing:4488454 | ||
== Program == | == Program == | ||
| − | Program beží na dvoch skriptoch plus jeden skript na kalibráciu senzorov. Program najprv prerobí obrázok do čierno-bielej | + | Program beží na dvoch skriptoch plus jeden skript na kalibráciu senzorov. Program najprv prerobí obrázok do čierno-bielej masky. Potom ohraničí nájdenú čiaru do boundary boxu. Následne pomocou získaných údajov sa nasmeruje, aby to sledovalo krivku čiary. Kód je programovany v pythone. Tello don je ovladan cez počítač a všetky operácie bežia na počítači. Kalibruje sa manuálne pomocou sliderov na obrazovke kód vyprinti údaje ,ktore potom treba prepísať hodnoty do premeny hsvVals. |
| − | + | <gallery mode="packed-hover" widths=200px heights=200px> | |
| − | + | File:DetekciaCiary.jpg|vytvorenie masky | |
| + | File:Ciara_po_spracovani_kodu.jpg |ohranicenie čiary. | ||
| + | </gallery> | ||
| + | <div style="text-align: center;"> | ||
| + | <youtube>VrjnU0igifw</youtube> | ||
| + | </div> | ||
== Zdrojový kód == | == Zdrojový kód == | ||
| + | [[File:TelloLineFollow.zip]] | ||
Latest revision as of 21:34, 14 February 2023
Cieľom tohto projektu bolo naučiť drona Tello sledovať čiaru pomocou kamery.

Hardver
Dron tello. Bolo potrebné vytlačiť nástavec so zrkadlom, aby dron mohol snímať zem. https://www.thingiverse.com/thing:4488454
Program
Program beží na dvoch skriptoch plus jeden skript na kalibráciu senzorov. Program najprv prerobí obrázok do čierno-bielej masky. Potom ohraničí nájdenú čiaru do boundary boxu. Následne pomocou získaných údajov sa nasmeruje, aby to sledovalo krivku čiary. Kód je programovany v pythone. Tello don je ovladan cez počítač a všetky operácie bežia na počítači. Kalibruje sa manuálne pomocou sliderov na obrazovke kód vyprinti údaje ,ktore potom treba prepísať hodnoty do premeny hsvVals.
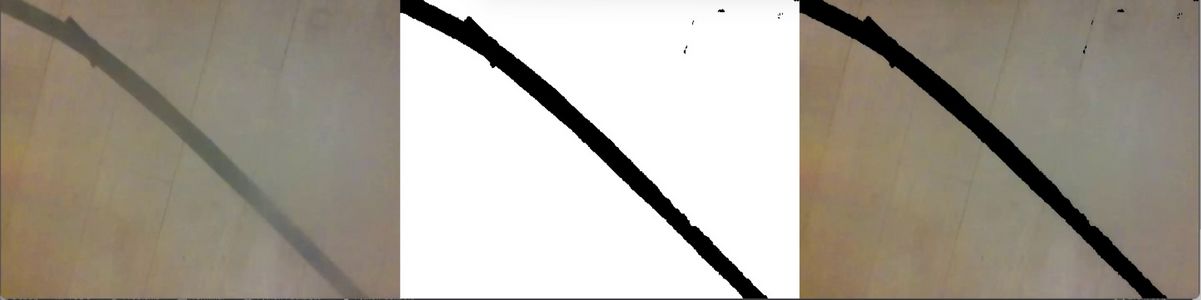
vytvorenie masky
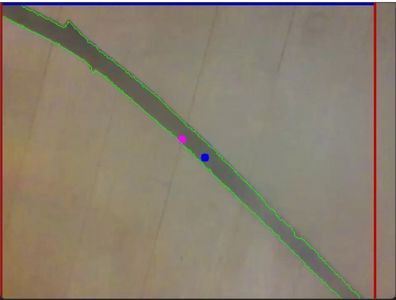
ohranicenie čiary.

