Difference between revisions of "Gripper Functionality for Remotely-Operated Robotics Laboratory"
From RoboWiki
m (→Demo) |
m (→Demo) |
||
| Line 26: | Line 26: | ||
== Demo == | == Demo == | ||
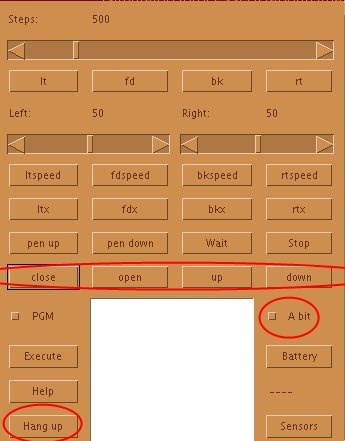
| + | #Ovladaci panel, vyznacene tlacitka sluzia na obsluhu ramena. Pri zapnutom prepinaci A bit sa rameno pohybuje o 1 jednotku.[[Image: controlPanel.jpg Kontrolny panel aplikacie ]] | ||
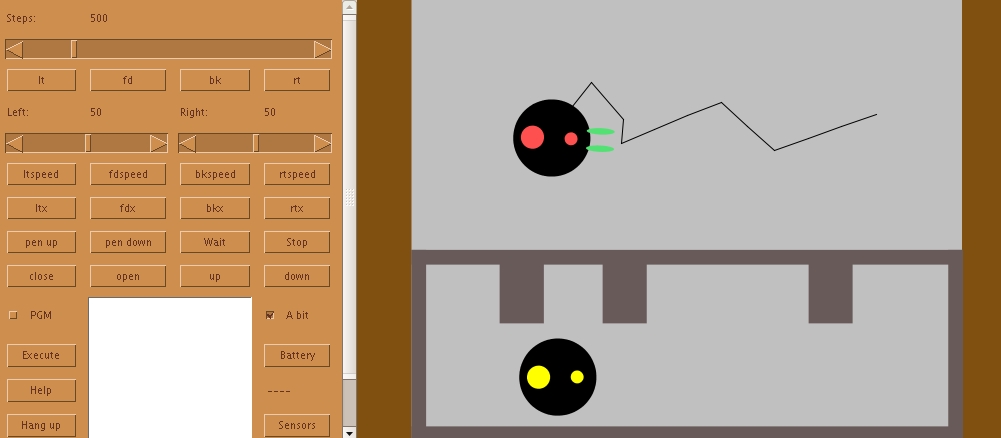
#Robotnacka s otvorenym ramenom sputenym uplne dole.[[Image: OpenDown.jpg Robotnacka s otvorenym ramenom uplne dole ]] | #Robotnacka s otvorenym ramenom sputenym uplne dole.[[Image: OpenDown.jpg Robotnacka s otvorenym ramenom uplne dole ]] | ||
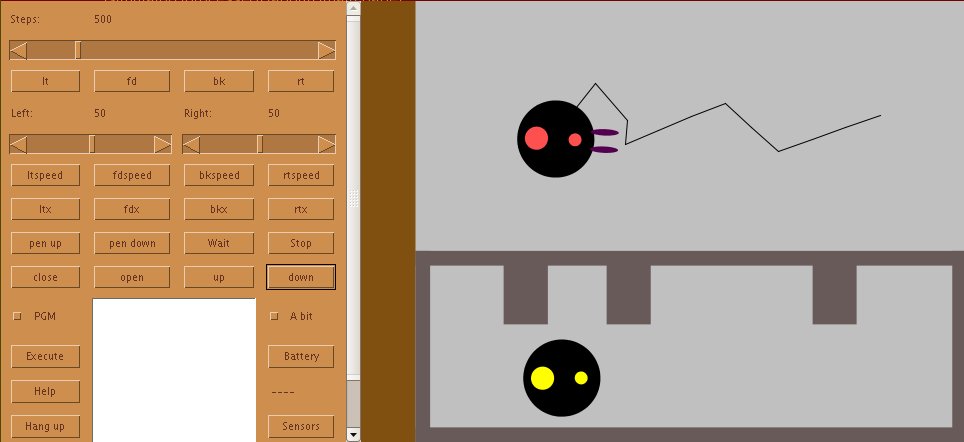
#Robotnacka s otvorenym ramenom vytiahnutym uplne hore[[Image: OpenUP.jpg Robotnacka s otvorenym ramenom uplne hore ]] | #Robotnacka s otvorenym ramenom vytiahnutym uplne hore[[Image: OpenUP.jpg Robotnacka s otvorenym ramenom uplne hore ]] | ||
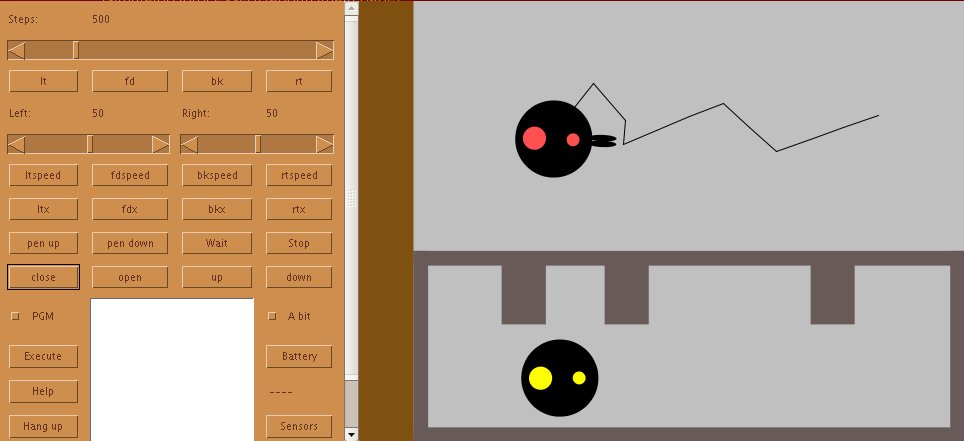
#Robotnacka so zatvorenym ramenom spustenym uplne dole[[Image: CloseDown.jpg Robotnacka so zavretym ramenom uplne hore ]] | #Robotnacka so zatvorenym ramenom spustenym uplne dole[[Image: CloseDown.jpg Robotnacka so zavretym ramenom uplne hore ]] | ||
__notoc__ | __notoc__ | ||
Revision as of 17:06, 22 June 2009
Goal
Our goal was to implement gripper functionality for Remotely-Operated Robotics Laboratory, so that Robotnacka will be able to grip objects, move and release them again.

Team
Michal Vince
Specification
- cielom je implementovat funkcionalitu ramien do robotickeho laboratoria,konkretne pohyb ramena hore a dole, a roztvaranie a zatvaranie ramena.
(aky pohyb rameno prave vykonava - pohyb uplne hore, pohyb uplne dole, uplne roztvorit, uplne zatvorit, posun hore o 1 jednotku, posun dole o 1 jednotku, otvorenie ramena o jednu jednotku, privretie ramena o 1 jednotku)
- zabezpecit prenos informacii o stave ramena pre zobrazovacie moduly, konkretne doplnit spravy pre moduly o informacie o stave ramena.
- zobrazovat rameno podla aktualneho stavu, upravit a doplnit zobrazovacie moduly aby boli schopne prijmat upravene spravy, ziskat z nich potrebne informacie pre zobrazenie ramena a nakoniec ho vykreslit
Implementation
- xc
- Do modulu Robot.h boli pridane potrebne premenne pre ulozenie stavu ramena, t.j. informacie o jeho vyske a jeho roztvoreni. Pridana bola premenna pre uchovavanie ci a ktoru prekazku rameno zviera.
- Takisto enumerovany typ pre popis aktualneho stavu ramena.
- robot.cpp pridana funkcia obsluhujaca rameno na zaklade prijateho packetu - packet s pismenom w,a,s,d, znamena....
- pri kazdej zmene stavu ramena je volana funkcia na odoslanie spravy pre zobrazujuce moduly
- V module Robot.cpp bola doplnena funkcia odosielajuca paket s informaciami o aktualnom stave Robotnacky (napr pre zobrazovaci modul) a
- Do zobrazovacieho modulu boli doplnene funkcie pre vykreslovanie
Demo
- Ovladaci panel, vyznacene tlacitka sluzia na obsluhu ramena. Pri zapnutom prepinaci A bit sa rameno pohybuje o 1 jednotku.
- Robotnacka s otvorenym ramenom sputenym uplne dole.
- Robotnacka s otvorenym ramenom vytiahnutym uplne hore
- Robotnacka so zatvorenym ramenom spustenym uplne dole