Pathfinder - Hana Hornáčková, Jozef Ševčík, Jelena Epifanic, Dario Lamaj
Goals of the project
The primary objective of this project is to develop an autonomous robot with the ability to explore its surroundings, follow a designated path, detect interruptions in the line, and successfully navigate around obstacles. The robot has been specifically designed to compete in the "Linefollower" category of the Istrobot Challenge.
Description of the project
Pathfinder is a car-like robot that is designed to perform various tasks, including exploring its environment and following a designated path line. It is specifically designed for the Istrobot challenge in the Pathfinder category, which is an annual robot competition held in Bratislava.
It is equipped with two RGB LEDs, a touch sensor (usual capacitive touch sensor for Arduino), an ultrasonic sensor - HC-SR04, a line tracking sensor - Kitronik Clippable Detection Board V1.0 (5678), two OND Motors RF12-002, a buzzer, and two 3.7V Li-Ion rechargeable batteries (18650). The robot operates on the "Arduino Nano Strong" platform and is programmed using Embedded C in the Arduino IDE.
The robot is equipped with two front-wheel drive motors, enabling it to perform a variety of tasks. The touch sensor is used to initiate the execution of the robot's program. By utilizing the line tracking sensor, the robot can accurately follow a black line. It is also capable of detecting obstacles along its path using the ultrasonic sensor, which measures the distance to the obstacles and allows the robot to navigate around them. LED lights are utilized to indicate the start of program execution, the detection of obstacles or any other changes in the environment.
Furthermore, the robot has an additional feature that allows it to explore its environment. By utilizing the "explore" function, the robot moves in one direction and when it encounters an obstacle, it changes its path and moves in another direction, allowing it to effectively navigate and explore the surroundings.
Pictures






Video
Video 1 - showcases the robot's ability to detect obstacles on the path, interruptions in the line, and resume following it.
Video 2 - demonstrates the robot's exploration capability, showcasing its ability to change its path when encountering obstacles.
Video 3 - improvements to solve last year course
Video 4 - pathfinder at Istrobot 2023
Source code
Resources
Arduino Nano Strong short specification:
https://laborjag.com/proximamente-a-la-venta/arduino-nano-v3-0-strong/
Kitronik Clippable Detection Board V1.0 (5678) datasheet:
https://resources.kitronik.co.uk/pdf/5678-kitronik-clippable-detector-board-microbit-datasheet.pdf
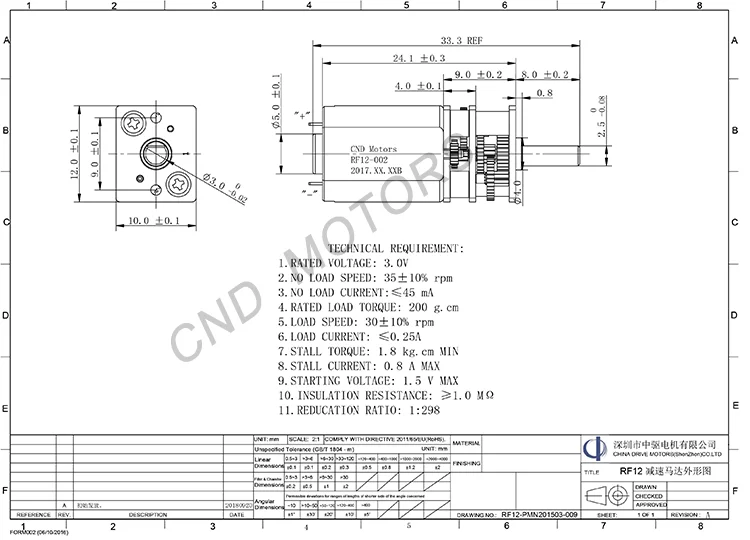
OND Motors RF12-002 datasheet:
https://sc02.alicdn.com/kf/HTB1lqbCXinrK1Rjy1Xc761eDVXar/234519318/HTB1lqbCXinrK1Rjy1Xc761eDVXar.png
{kind=link}
HC-SR04 (Ultrasonic sensor) datasheet: https://cdn.sparkfun.com/datasheets/Sensors/Proximity/HCSR04.pdf
Useful Arduino programming workshop (YouTube):
https://www.youtube.com/watch?v=BLrHTHUjPuw
Official site of Arduino:
https://www.arduino.cc/
Getting started with Arduino:
https://docs.arduino.cc/learn/starting-guide/getting-started-arduino
Using the Arduino Software (IDE):
https://docs.arduino.cc/learn/starting-guide/the-arduino-software-ide