|
|
| Line 29: |
Line 29: |
| | | | |
| | | | |
| − | '''Pohyb do ľubovoľného smeru''' | + | '''Nieco''' |
| | | | |
| | | | |
| | | | |
| − | if (angle>=90 && angle <180){
| + | |
| − |
| |
| − | uhol = angle-90;
| |
| − | zvislo = (90.0-uhol)/90.0*speed;
| |
| − | vodorovne = uhol/90.0*speed;
| |
| − | int z = zvislo;
| |
| − | int v = vodorovne;
| |
| − |
| |
| − | setMotor(3,v,0);
| |
| − | setMotor(2,v,0);
| |
| − | setMotor(1,z,1);
| |
| − | setMotor(4,z,0);
| |
| − | wait(time);
| |
| − | setMotor(1, 0, 0);
| |
| − | setMotor(2, 0, 0);
| |
| − | setMotor(3, 0, 0);
| |
| − | setMotor(4, 0, 0);
| |
| − | }
| |
| | | | |
| − | if (angle>=180 && angle <270){
| |
| | | | |
| − | uhol = angle-180;
| |
| − | zvislo = (90.0-uhol)/90.0*speed;
| |
| − | vodorovne = uhol/90.0*speed;
| |
| − | int z = zvislo;
| |
| − | int v = vodorovne;
| |
| | | | |
| − | setMotor(3,z,0);
| |
| − | setMotor(2,z,0);
| |
| − | setMotor(1,v,0);
| |
| − | setMotor(4,v,1);
| |
| − | wait(time);
| |
| − | setMotor(1, 0, 0);
| |
| − | setMotor(2, 0, 0);
| |
| − | setMotor(3, 0, 0);
| |
| − | setMotor(4, 0, 0);
| |
| − | }
| |
| | | | |
| − | if (angle>=270 && angle <=360){
| |
| − |
| |
| − | uhol = angle-270;
| |
| − | zvislo = (90.0-uhol)/90.0*speed;
| |
| − | vodorovne = uhol/90.0*speed;
| |
| − | int z = zvislo;
| |
| − | int v = vodorovne;
| |
| − |
| |
| − | setMotor(3,v,1);
| |
| − | setMotor(2,v,1);
| |
| − | setMotor(1,z,0);
| |
| − | setMotor(4,z,1);
| |
| − | wait(time);
| |
| − | setMotor(1, 0, 0);
| |
| − | setMotor(2, 0, 0);
| |
| − | setMotor(3, 0, 0);
| |
| − | setMotor(4, 0, 0);
| |
| − | }
| |
| − |
| |
| − | '''Rotácie'''
| |
| − |
| |
| − | void RotateLeft(int speed, int time)
| |
| − | {
| |
| − | setMotor(1,speed,0);
| |
| − | setMotor(2,speed,1);
| |
| − | setMotor(3,speed,0);
| |
| − | setMotor(4,speed,0);
| |
| − | wait(time);
| |
| − | setMotor(1, 0, 0);
| |
| − | setMotor(2, 0, 0);
| |
| − | setMotor(3, 0, 0);
| |
| − | setMotor(4, 0, 0);
| |
| − | }
| |
| | | | |
| − | void RotateRight(int speed, int time)
| + | '''nieco1''' |
| − | {
| |
| − | setMotor(1,speed,1);
| |
| − | setMotor(2,speed,0);
| |
| − | setMotor(3,speed,1);
| |
| − | setMotor(4,speed,1);
| |
| − | wait(time);
| |
| − | setMotor(1, 0, 0);
| |
| − | setMotor(2, 0, 0);
| |
| − | setMotor(3, 0, 0);
| |
| − | setMotor(4, 0, 0);
| |
| − | }
| |
| | | | |
| | == 3. etapa == | | == 3. etapa == |
Revision as of 16:59, 28 June 2013
Zadanie
Trajectory from gyro/accellerometer/compas. Requirement: must use this part: 9DOF IMU
O súčiastke
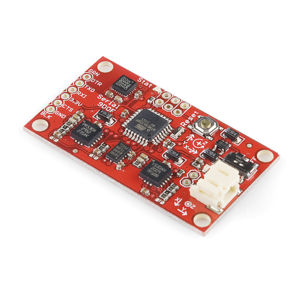
V projekte sme mali využiť súčiastku 9DOF IMU a následne zo získaných dát vykresliť prejdenú trajektóriu robota.
Na doske 9DOF IMU sa nachádzajú nasledujúce komponenty:
Etapy
- 1. Oboznamánie sa s projektom
- 2. Naprogramovanie v Jave
- 3. Záverečné prípravy
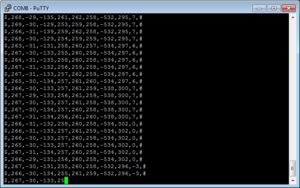
1. etapa
V prvej etape sme dostali súčiastku a cez program Putty skúšali jej funkčnosť.
2. etapa
Nieco
nieco1
3. etapa

